Search Methods¶
In this notebook, we will showcase how to use the Efficient Active Search (EAS) algorithm to find better solutions to existing problems!
![]()
Installation¶
Uncomment the following line to install the package from PyPI. Remember to choose a GPU runtime for faster training!
Note: You may need to restart the runtime in Colab after this
[ ]:
# !pip install rl4co[graph] # include torch-geometric
## NOTE: to install latest version from Github (may be unstable) install from source instead:
# !pip install git+https://github.com/ai4co/rl4co.git
Imports¶
[1]:
%load_ext autoreload
%autoreload 2
import torch
from rl4co.envs import TSPEnv, CVRPEnv
from rl4co.models.zoo.am import AttentionModel
from rl4co.utils.trainer import RL4COTrainer
from rl4co.models.nn.utils import get_log_likelihood
from rl4co.models.zoo import EAS, EASLay, EASEmb, ActiveSearch
import logging
2023-08-22 16:29:17.903805: I tensorflow/core/util/port.cc:110] oneDNN custom operations are on. You may see slightly different numerical results due to floating-point round-off errors from different computation orders. To turn them off, set the environment variable `TF_ENABLE_ONEDNN_OPTS=0`.
2023-08-22 16:29:17.923169: I tensorflow/core/platform/cpu_feature_guard.cc:182] This TensorFlow binary is optimized to use available CPU instructions in performance-critical operations.
To enable the following instructions: AVX2 AVX512F AVX512_VNNI AVX512_BF16 FMA, in other operations, rebuild TensorFlow with the appropriate compiler flags.
2023-08-22 16:29:18.249479: W tensorflow/compiler/tf2tensorrt/utils/py_utils.cc:38] TF-TRT Warning: Could not find TensorRT
[2]:
# Load from checkpoint; alternatively, simply instantiate a new model
checkpoint_path = "last.ckpt" # model trained for one epoch only just for showing the examples
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# load checkpoint
# checkpoint = torch.load(checkpoint_path)
model = AttentionModel.load_from_checkpoint(checkpoint_path, load_baseline=False)
policy = model.policy.to(device)
/home/botu/miniconda3/envs/rl4co/lib/python3.10/site-packages/lightning/pytorch/utilities/parsing.py:196: UserWarning: Attribute 'env' is an instance of `nn.Module` and is already saved during checkpointing. It is recommended to ignore them using `self.save_hyperparameters(ignore=['env'])`.
rank_zero_warn(
/home/botu/miniconda3/envs/rl4co/lib/python3.10/site-packages/lightning/pytorch/utilities/parsing.py:196: UserWarning: Attribute 'policy' is an instance of `nn.Module` and is already saved during checkpointing. It is recommended to ignore them using `self.save_hyperparameters(ignore=['policy'])`.
rank_zero_warn(
/home/botu/miniconda3/envs/rl4co/lib/python3.10/site-packages/lightning/pytorch/core/saving.py:164: UserWarning: Found keys that are not in the model state dict but in the checkpoint: ['baseline.baseline.model.encoder.init_embedding.init_embed.weight', 'baseline.baseline.model.encoder.init_embedding.init_embed.bias', 'baseline.baseline.model.encoder.net.layers.0.0.module.Wqkv.weight', 'baseline.baseline.model.encoder.net.layers.0.0.module.Wqkv.bias', 'baseline.baseline.model.encoder.net.layers.0.0.module.out_proj.weight', 'baseline.baseline.model.encoder.net.layers.0.0.module.out_proj.bias', 'baseline.baseline.model.encoder.net.layers.0.1.normalizer.weight', 'baseline.baseline.model.encoder.net.layers.0.1.normalizer.bias', 'baseline.baseline.model.encoder.net.layers.0.1.normalizer.running_mean', 'baseline.baseline.model.encoder.net.layers.0.1.normalizer.running_var', 'baseline.baseline.model.encoder.net.layers.0.1.normalizer.num_batches_tracked', 'baseline.baseline.model.encoder.net.layers.0.2.module.0.weight', 'baseline.baseline.model.encoder.net.layers.0.2.module.0.bias', 'baseline.baseline.model.encoder.net.layers.0.2.module.2.weight', 'baseline.baseline.model.encoder.net.layers.0.2.module.2.bias', 'baseline.baseline.model.encoder.net.layers.0.3.normalizer.weight', 'baseline.baseline.model.encoder.net.layers.0.3.normalizer.bias', 'baseline.baseline.model.encoder.net.layers.0.3.normalizer.running_mean', 'baseline.baseline.model.encoder.net.layers.0.3.normalizer.running_var', 'baseline.baseline.model.encoder.net.layers.0.3.normalizer.num_batches_tracked', 'baseline.baseline.model.encoder.net.layers.1.0.module.Wqkv.weight', 'baseline.baseline.model.encoder.net.layers.1.0.module.Wqkv.bias', 'baseline.baseline.model.encoder.net.layers.1.0.module.out_proj.weight', 'baseline.baseline.model.encoder.net.layers.1.0.module.out_proj.bias', 'baseline.baseline.model.encoder.net.layers.1.1.normalizer.weight', 'baseline.baseline.model.encoder.net.layers.1.1.normalizer.bias', 'baseline.baseline.model.encoder.net.layers.1.1.normalizer.running_mean', 'baseline.baseline.model.encoder.net.layers.1.1.normalizer.running_var', 'baseline.baseline.model.encoder.net.layers.1.1.normalizer.num_batches_tracked', 'baseline.baseline.model.encoder.net.layers.1.2.module.0.weight', 'baseline.baseline.model.encoder.net.layers.1.2.module.0.bias', 'baseline.baseline.model.encoder.net.layers.1.2.module.2.weight', 'baseline.baseline.model.encoder.net.layers.1.2.module.2.bias', 'baseline.baseline.model.encoder.net.layers.1.3.normalizer.weight', 'baseline.baseline.model.encoder.net.layers.1.3.normalizer.bias', 'baseline.baseline.model.encoder.net.layers.1.3.normalizer.running_mean', 'baseline.baseline.model.encoder.net.layers.1.3.normalizer.running_var', 'baseline.baseline.model.encoder.net.layers.1.3.normalizer.num_batches_tracked', 'baseline.baseline.model.encoder.net.layers.2.0.module.Wqkv.weight', 'baseline.baseline.model.encoder.net.layers.2.0.module.Wqkv.bias', 'baseline.baseline.model.encoder.net.layers.2.0.module.out_proj.weight', 'baseline.baseline.model.encoder.net.layers.2.0.module.out_proj.bias', 'baseline.baseline.model.encoder.net.layers.2.1.normalizer.weight', 'baseline.baseline.model.encoder.net.layers.2.1.normalizer.bias', 'baseline.baseline.model.encoder.net.layers.2.1.normalizer.running_mean', 'baseline.baseline.model.encoder.net.layers.2.1.normalizer.running_var', 'baseline.baseline.model.encoder.net.layers.2.1.normalizer.num_batches_tracked', 'baseline.baseline.model.encoder.net.layers.2.2.module.0.weight', 'baseline.baseline.model.encoder.net.layers.2.2.module.0.bias', 'baseline.baseline.model.encoder.net.layers.2.2.module.2.weight', 'baseline.baseline.model.encoder.net.layers.2.2.module.2.bias', 'baseline.baseline.model.encoder.net.layers.2.3.normalizer.weight', 'baseline.baseline.model.encoder.net.layers.2.3.normalizer.bias', 'baseline.baseline.model.encoder.net.layers.2.3.normalizer.running_mean', 'baseline.baseline.model.encoder.net.layers.2.3.normalizer.running_var', 'baseline.baseline.model.encoder.net.layers.2.3.normalizer.num_batches_tracked', 'baseline.baseline.model.decoder.context_embedding.W_placeholder', 'baseline.baseline.model.decoder.context_embedding.project_context.weight', 'baseline.baseline.model.decoder.project_node_embeddings.weight', 'baseline.baseline.model.decoder.project_fixed_context.weight', 'baseline.baseline.model.decoder.logit_attention.project_out.weight']
rank_zero_warn(
[3]:
# env = CVRPEnv(num_loc=50)
# policy = AttentionModel(env).policy.to(device)
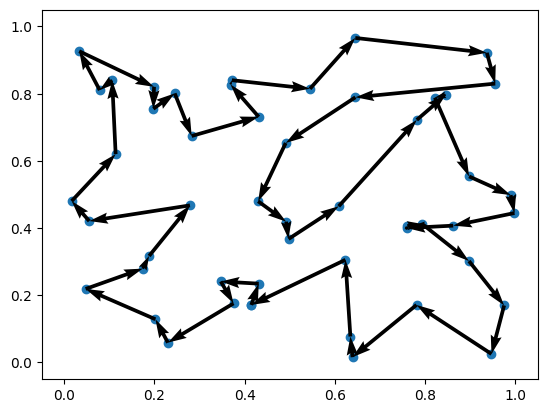
env = TSPEnv(num_loc=50)
td = env.reset(batch_size=3).to(device)
out = policy(td, return_actions=True)
[4]:
env.render(td.cpu(), out["actions"].cpu())
EAS¶
We perform few iterations of EASLay for demonstration
[5]:
logging.basicConfig(level=logging.DEBUG)
env.num_loc = 200
dataset = env.dataset(batch_size=[2])
# eas_model = EASEmb(env, policy, dataset, batch_size=2, max_iters=20, save_path="eas_sols.pt") # alternative
eas_model = EASLay(env, policy, dataset, batch_size=2, max_iters=20, save_path="eas_sols.pt")
eas_model.setup()
/home/botu/miniconda3/envs/rl4co/lib/python3.10/site-packages/lightning/pytorch/utilities/parsing.py:196: UserWarning: Attribute 'env' is an instance of `nn.Module` and is already saved during checkpointing. It is recommended to ignore them using `self.save_hyperparameters(ignore=['env'])`.
rank_zero_warn(
/home/botu/miniconda3/envs/rl4co/lib/python3.10/site-packages/lightning/pytorch/utilities/parsing.py:196: UserWarning: Attribute 'policy' is an instance of `nn.Module` and is already saved during checkpointing. It is recommended to ignore them using `self.save_hyperparameters(ignore=['policy'])`.
rank_zero_warn(
INFO:rl4co.models.rl.common.base:No metrics specified, using default
INFO:rl4co.models.zoo.eas.search:Setting up Efficient Active Search (EAS) with:
- EAS Embedding: False
- EAS Layer: True
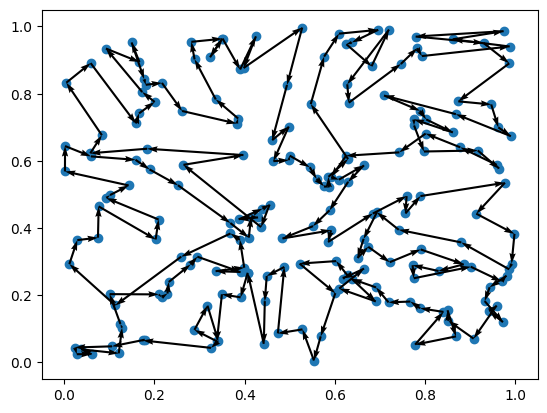
[6]:
# Plot initial solution
td_dataset = next(iter(eas_model.train_dataloader()))
td_dataset = env.reset(td_dataset).to(device)
out = policy(td_dataset, return_actions=True)
env.render(td_dataset.cpu(), out["actions"].cpu())
INFO:rl4co.models.zoo.common.autoregressive.policy:Instantiated environment not provided; instantiating tsp
Perform search¶
[7]:
from rl4co.utils.trainer import RL4COTrainer
trainer = RL4COTrainer(
max_epochs=1,
gradient_clip_val=None,
)
trainer.fit(eas_model)
WARNING:rl4co.utils.trainer:gradient_clip_val is set to None. This may lead to unstable training.
Using 16bit Automatic Mixed Precision (AMP)
GPU available: True (cuda), used: True
TPU available: False, using: 0 TPU cores
IPU available: False, using: 0 IPUs
HPU available: False, using: 0 HPUs
INFO:rl4co.models.zoo.eas.search:Setting up Efficient Active Search (EAS) with:
- EAS Embedding: False
- EAS Layer: True
DEBUG:fsspec.local:open file: /home/botu/Dev/rl4co-rebuttal/notebooks/dev/lightning_logs/version_181/hparams.yaml
DEBUG:fsspec.local:open file: /home/botu/Dev/rl4co-rebuttal/notebooks/dev/lightning_logs/version_181/hparams.yaml
LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
INFO:rl4co.models.rl.common.base:Instantiating optimizer <Adam>
| Name | Type | Params
------------------------------------------------
0 | env | TSPEnv | 0
1 | policy | AttentionModelPolicy | 710 K
------------------------------------------------
710 K Trainable params
0 Non-trainable params
710 K Total params
2.841 Total estimated model params size (MB)
/home/botu/miniconda3/envs/rl4co/lib/python3.10/site-packages/lightning/pytorch/trainer/connectors/data_connector.py:432: PossibleUserWarning: The dataloader, val_dataloader, does not have many workers which may be a bottleneck. Consider increasing the value of the `num_workers` argument` (try 32 which is the number of cpus on this machine) in the `DataLoader` init to improve performance.
rank_zero_warn(
/home/botu/miniconda3/envs/rl4co/lib/python3.10/site-packages/lightning/pytorch/trainer/connectors/data_connector.py:432: PossibleUserWarning: The dataloader, train_dataloader, does not have many workers which may be a bottleneck. Consider increasing the value of the `num_workers` argument` (try 32 which is the number of cpus on this machine) in the `DataLoader` init to improve performance.
rank_zero_warn(
/home/botu/miniconda3/envs/rl4co/lib/python3.10/site-packages/lightning/pytorch/loops/fit_loop.py:280: PossibleUserWarning: The number of training batches (1) is smaller than the logging interval Trainer(log_every_n_steps=50). Set a lower value for log_every_n_steps if you want to see logs for the training epoch.
rank_zero_warn(
/home/botu/Dev/rl4co-rebuttal/notebooks/dev/../../rl4co/models/zoo/eas/nn.py:22: UserWarning: nn.init.xavier_uniform is now deprecated in favor of nn.init.xavier_uniform_.
torch.nn.init.xavier_uniform(self.W1)
/home/botu/Dev/rl4co-rebuttal/notebooks/dev/../../rl4co/models/zoo/eas/nn.py:23: UserWarning: nn.init.xavier_uniform is now deprecated in favor of nn.init.xavier_uniform_.
torch.nn.init.xavier_uniform(self.b1)
INFO:rl4co.models.rl.common.base:Instantiating optimizer <Adam>
/home/botu/miniconda3/envs/rl4co/lib/python3.10/site-packages/lightning/pytorch/trainer/connectors/logger_connector/result.py:212: UserWarning: You called `self.log('step', ...)` in your `training_step` but the value needs to be floating point. Converting it to torch.float32.
warning_cache.warn(
INFO:rl4co.models.zoo.eas.search:0/20 | Reward: -15.52
INFO:rl4co.models.zoo.eas.search:1/20 | Reward: -15.32
INFO:rl4co.models.zoo.eas.search:2/20 | Reward: -15.30
INFO:rl4co.models.zoo.eas.search:3/20 | Reward: -15.28
INFO:rl4co.models.zoo.eas.search:4/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:5/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:6/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:7/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:8/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:9/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:10/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:11/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:12/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:13/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:14/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:15/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:16/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:17/20 | Reward: -15.01
INFO:rl4co.models.zoo.eas.search:18/20 | Reward: -14.84
INFO:rl4co.models.zoo.eas.search:19/20 | Reward: -14.74
INFO:rl4co.models.zoo.eas.search:Best reward: -14.74
INFO:rl4co.models.zoo.eas.search:Saving solutions and rewards to eas_sols.pt...
`Trainer.fit` stopped: `max_epochs=1` reached.
Load actions¶
[10]:
# Load
actions = torch.load("eas_sols.pt")["solutions"][0].cpu()
actions = actions[:torch.count_nonzero(actions, dim=-1)] # remove trailing zeros
state = td_dataset.cpu()[0]
env.render(state, actions)
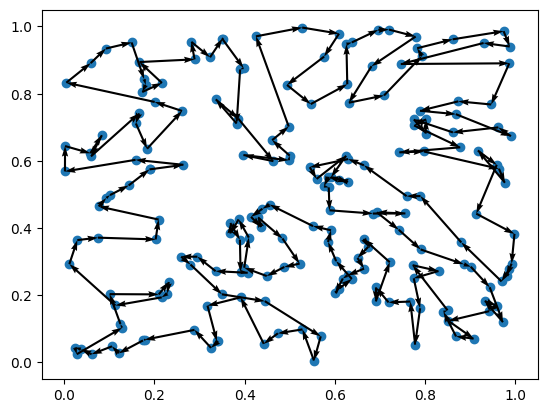
Even with few iterations, the search method can clearly find better solutions than the initial ones!
